

技术论文|改进高速移动系统中机器视觉成像稳定性的方法研究
改进高速移动系统中机器视觉成像稳定性的方法研究
摘要:工业机器视觉系统为了提高生产效率,不允许被检测物体停止运动获取图像,一般都是运动过程中通过某些运动位置反馈信号触发相机硬件采集图像,由于检测目标的多样性,导致相机物距的波动,必须提高相机镜头景深,造成图像亮度降低,影响机器视觉系统的识别精确性。同时由于运动过程中产生的振动和相机传感器最短曝光时间的限制,导致运动速度越高,图像越模糊,降低了机器视觉系统的识别精确性。基于以上问题,设计了一种高速运动下的相机光源同步触发和灯珠过载控制控制系统,极大地提高了图像的亮度,同时提高了图像系统的景深,并且不受相机最短曝光时间的限制,在高速贴片机上获取清晰且重复度很高的图像,大大提高了生产效率。
关键词:高速取像 飞行视觉 光源控制
Absrtact: In order to improve the production efficiency, the industrial machine vision system does not allow the detected object to stop moving to obtain the image. Generally, the camera hardware is triggered to collect the image through some motion position feedback signals in the process of moving. Due to the diversity of the detected objects, the camera object distance fluctuates, so the camera lens depth of field must be improved, resulting in the decrease of image brightness, which affects the machine vision identification accuracy of the system. At the same time, due to the vibration generated in the process of motion and the limitation of the shortest exposure time of the camera sensor, the higher the motion speed is, the more blurred the image is, which reduces the recognition accuracy of the machine vision system. Based on the above problems, a high-speed camera light source synchronous trigger and lamp overload control system is designed, which greatly improves the brightness of the image, improves the depth of field of the image system, and is not limited by the shortest exposure time of the camera. It can obtain clear and highly repetitive images on the high-speed mounter, which greatly improves the production efficiency.
Key words: high speed image acquisition, flight vision, light control
近年来,随着先进装备制造的高速发展,高速运动目标图像识别定位成为机器视觉领域中一个非常关键的课题,对先进装备制造和提高社会生产力具有重大意义。高速运动图像获取系统直接影响了智能装备的生产效率和精度稳定性,因此,改进图像获取方式和光源控制方式,已经成为各个智能装备制造企业的研究重点。
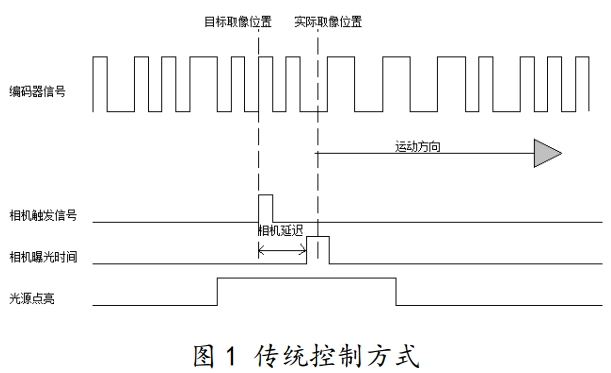
在运动过程中获取图像,传统方法是利用光栅尺和旋转编码器反馈位置到运动控制器,光源提前点亮,到达目标取像位置时运动控制器会输出触发信号到相机,相机收到信号经过一定时间延迟开始进行曝光,曝光完成之后熄灭光源[1]。由于相机收到触发信号延迟一定时间曝光,高速运动中速度会有波动,运动中加速和减速都会造成实际取像位置有差别,影响机器视觉定位精度。对相机最短曝光时间有较高要求,一般CMOS传感器最短曝光时间都在10us以上,运动速度乘以曝光时间过大会使得取像模糊,必须采用专门的模糊降噪算法处理图像[2],否则影响机器视觉识别精度。光源发热严重。由于运动过程中光源点亮时间较长,光源会有较大的发热,造成图像灰度波动。
为了克服现有技术的不足,提出一种基于光源控制器的具有实时速度检测方法用来解决解决取像位置易变化、取像模糊以及光源发热热量过高的技术问题。
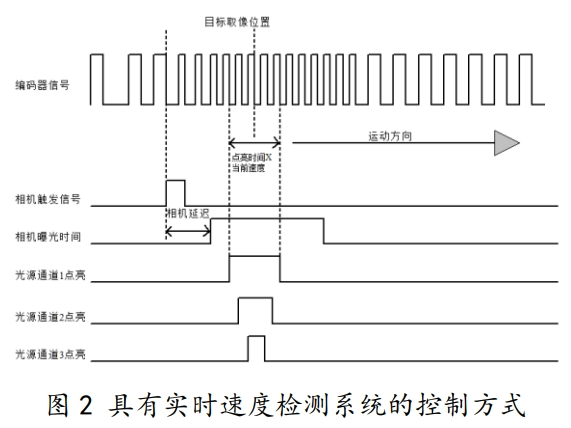
运动物体通过光栅尺或者编码器将运动信号接入至光源控制器中的FPGA。计算机通过CAN通信卡将运动物体的目标取像坐标,相机曝光延迟时间、各个光源通道光源点亮时间以及光源亮度发送至光源控制器。光源控制器中的FPGA根据光栅尺或者编码器的运动信号实时计算运动物体的当前运动速度。当运动物体到达第一目标位置时,相机基于光源控制器输出的触发信号进行延迟曝光。当运动物体到达第二目标位置时,光源控制器根据各个光源通道点亮时间对各个通道光源进行点亮。当运动物体到达第三目标位置时,光源控制器控制点亮时间最长通道光源关闭。如图2所示,所有通道点亮位置关于目标取像位置对称,实现不同速度下成像位置的一致性,所述具体步骤包括:
(1)计算机通过运动控制卡控制电机进行回零完成。
(2)通过CAN通信卡向光源控制器发送清零命令帧。
(3)光源控制器中的FPGA获取时间为t1时刻的编码器位置值XT。
(4)光源控制器中的FPGA获取时间为t2时刻的编码器位置值XT+1。
(5)则当前运动物体速度为Vact=(XT+1-XT)/t,时间间隔t小于100 us,其中,t1时刻与t2时刻之间的时间间隔为t。
(6)当运动物体到达XTAR -(Tedelay+0.5 * Tlightmax)* Vact 第一位置时,相机基于光源控制器输出的触发信号进行延迟曝光。其中目标取像位置XTAR,相机曝光延迟Tedelay,Tedelay指的是相机接收到触发信号到开始曝光的延迟时间,各个通道点亮时间最大值为Tlightmax,当前运动物体速度Vact 。
(7)当运动物体到达XTAR -(0.5 * Tlightmax)* Vact 第二位置时,光源控制器根据各个光源通道点亮时间对各个通道光源进行点亮,各个通道中点亮时间最大值为Tlightmax,光源控制器根据光源根据各个光源通道点亮时间各个通道光源进行点亮,其中各个通道光源属于各种方位光源,包括正面光源、侧面光源。其中各个通道光源颜色也不尽相同。
(8)当运动物体到达XTAR +(0.5 * Tlightmax)* Vact 第三位置时,光源控制器根据各个光源通道点亮时间对其中点亮时间最长的通道光源进行关闭,所有通道点亮位置与熄灭位置关于目标取像位置对称。
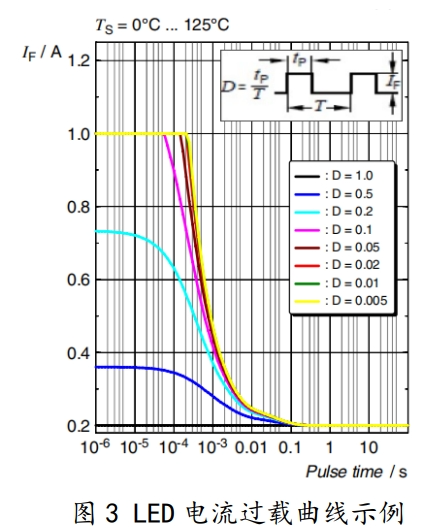
与此同时,由于点亮时间极短,LED灯珠可以进行过载点亮,根据图3所示LED灯珠在脉冲式点亮过程可以适当进行过载[3],配合LED过载曲线,可以使得LED光源亮度达到额定值的2倍以上亮度,进而提高图像亮度和景深。由于点亮时间极短,所以LED发热量极低,降低了光源亮度受温度影响的波动,提高了光源寿命。
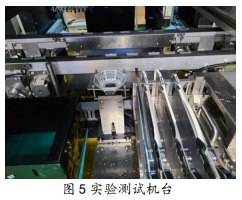
为了验证本文提出的方案的有效性,需要进行相关实验分析,实验平台的路远智能装备的CPMII 高速贴片机,将光栅尺信号通过LVDS高速接口接入光源控制器,提高传输速率[4],图4所示为光源控制器,图5所示为实验机台,其中相机为500万像素面阵相机,相机传感器曝光最短时间为15 us,光源控制器连接两通道红光LED,包括正光、侧光,额定电流均为1000 mA,使用示波器测量串联在灯珠上的0.1欧姆采样电阻来观察LED电流波形。
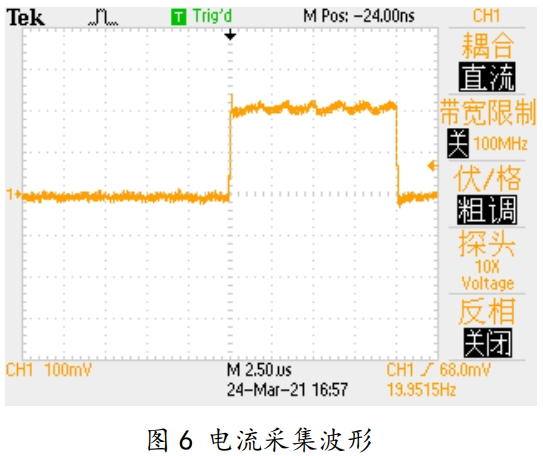
设置目标电流为额定电流的两倍,运动过程中采集得到图6波形,可以观察到光源电流波形控制正常,产生了10 us的脉冲电流,电流幅值为2000 mA。周期约为50 ms一个脉冲,持续工作一小时,通过热成像仪分析,光源温度与室温相同。
为了验证不同运动状态下的取像稳定性,通过采集不同运动速度下的图像,观察图像效果进行对比。图7为传统采集模式下图像效果,提前点亮光源,运动过程中相机收到触发信号开始取像,运动速度最大达到500 mm/s、1000 mm/s和2000 mm/s,相机曝光时间设置为最短15 us,明显观察到不同速度下图像成像位置有偏差,最大成像位置偏差超过了0.5 mm,严重影响机器视觉系统精度,由于持续采集图像,每次LED点亮时间超过150 ms,工作电流为额定电流1000 mA,造成LED温度上升,导致图像亮度有一定下降。
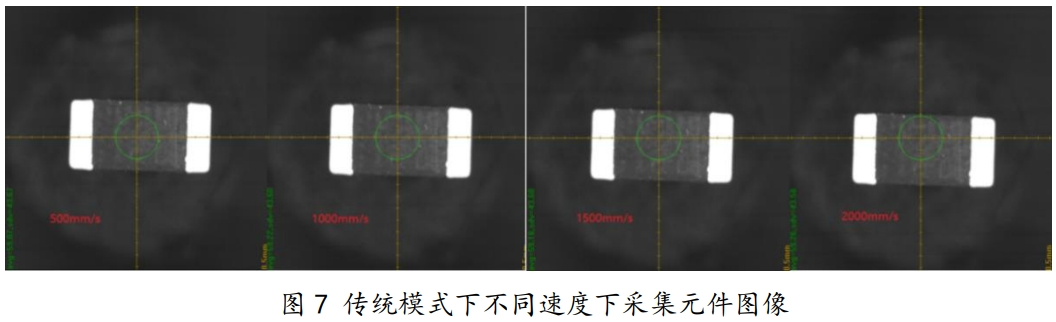
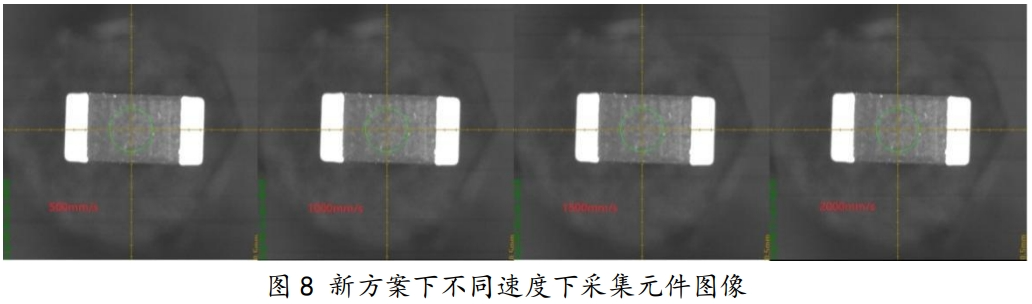
图8采用新方案,相机曝光时间为最短15 us,运动速度最大达到500 mm/s、1000 mm/s和2000 mm/s,结果成像位置一致,由于光源只点亮了10 us,工作电流时传统方式的2倍,导致清晰度和亮度更高,LED也没有明显温度波动。
[1]高速CCD摄像系统及其应用[J]. 王军波,孙振国,陈强. 实验技术与管理. 2001(06)
[2]庄玉册, 赵莉苹. 关于运动图像模糊区域边界优化降噪仿真[J].计算机仿真, 2018, 035(005):322-325.
[3] LA CN5M Datasheet Version 1.6 . 2020-03-23(9)
[4] 刘祥元, 陈书明. LVDS 高速在 I/O 接口单元的设计研究[J]. 计算机工程与科学, 2001,23(4): 52-56.
谢锐涛(1990-),深圳市路远路远智能装备有限公司研发工程师
邓泽峰(1976-),深圳市路远智能装备有限公司研发副总
贾孝荣(1973-),深圳市路远路远智能装备有限公司董事长兼总经理[i]














请先 登录后发表评论 ~